Stereo Matching
COS 351 - Computer Vision
Fundamental Matrix
|
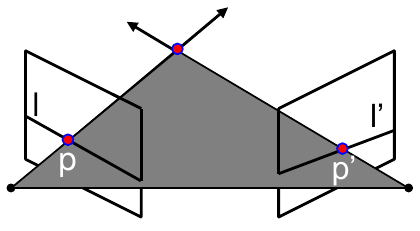
Let \(p\) be a point in left image, \(p'\) in right image Epipolar relation
Epipolar mapping described by a 3x3 matrix \(F\) \[l' = Fp \quad\quad l = p'F\] It follows that \[p'Fp = 0\] |
 |
Fundamental Matrix
This matrix \(F\) is called
- "Essential Matrix" when image intrinsic parameters are known
- "Fundamental Matrix" more generally (uncalibrated case)
Can solve for \(F\) from point correspondences
- Each \((p,p')\) pair gives one linear equation in entries of \(F\) \[p'Fp = 0\]
- \(F\) has 9 entries, but really only 7 or 8 degrees of freedom
- With 8 points, it is simple to solve for \(F\), but it is also possible with 7. See Marc Pollefey's notes for a nice tutorial.
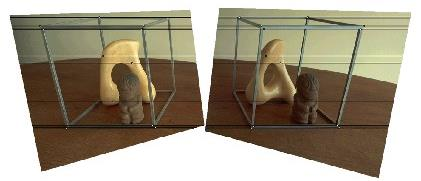
stereo image rectification
|
 |
rectification example

correspondence problem
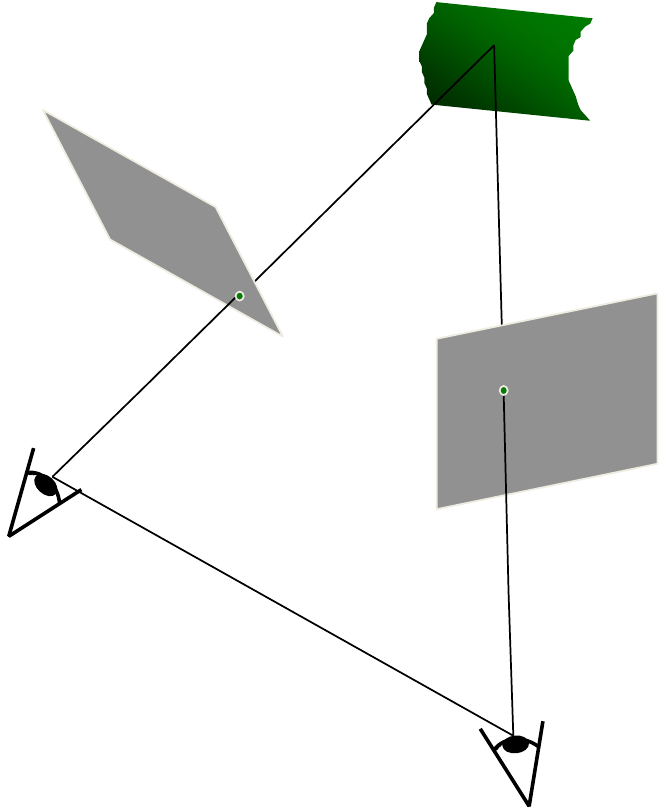
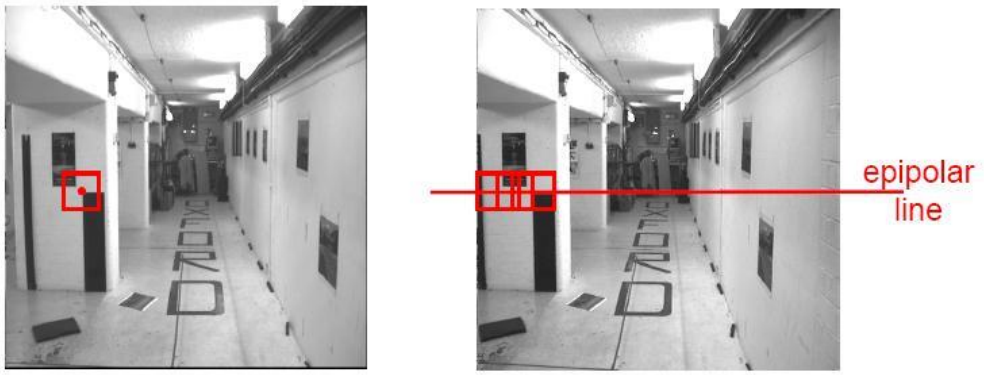
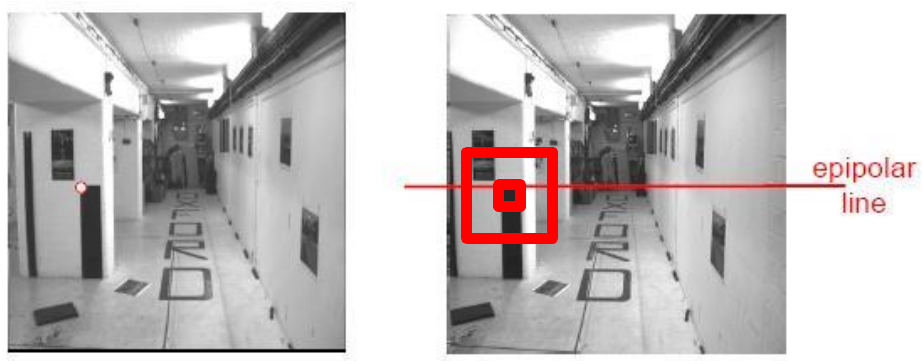
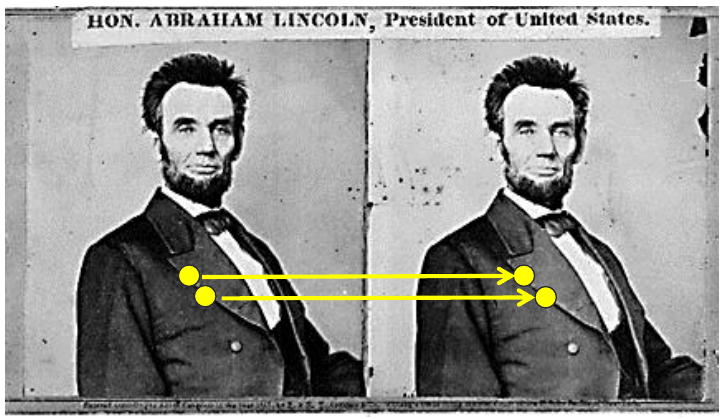
Epipolar geometry constrains our search, but we still have a difficult correspondence problem.
correspondence problem
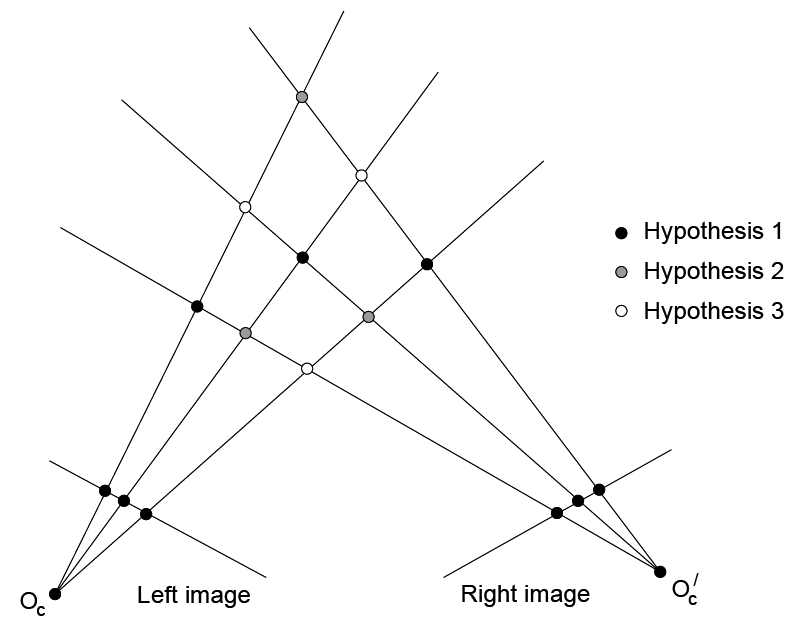 
 |
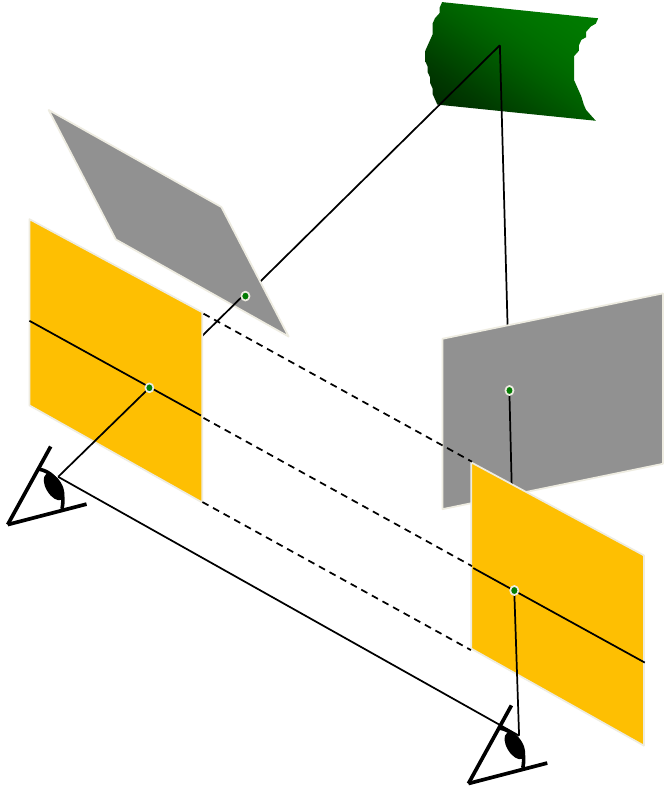
Multiple match hypotheses satisfy epipolar constraint, but which is correct? |
correspondence problem
Beyond the hard constraint of epipolar geometry, there are "soft" constraints to help identify corresponding points
- similarities
- uniqueness
- ordering
- disparity gradient
To find matches in the image pair, we will assume
- most scene points visible from both views
- image regions for the matches are similar in appearance
dense correspondence search
- For each epipolar line
- For each pixel/window in left image
- Compare with every pixel/window on same epipolar line in right image
- Pick position with minimum match cost (e.g., SSD, normalized correlation)
- For each pixel/window in left image
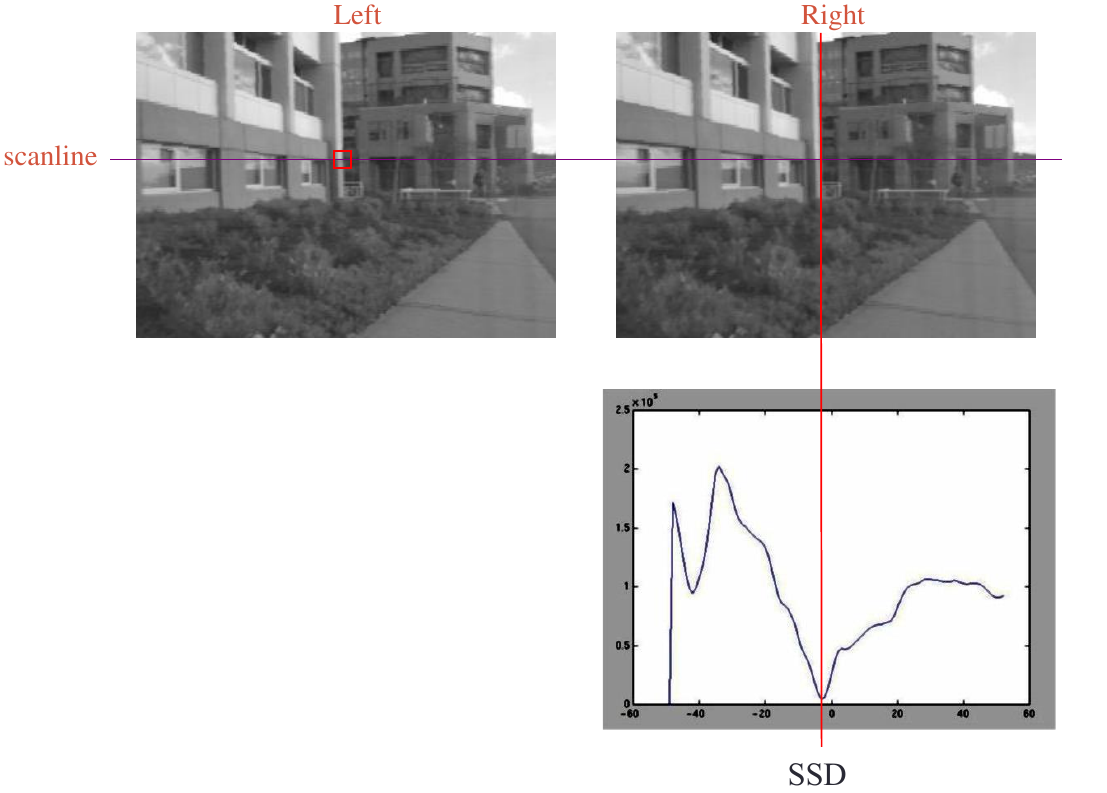
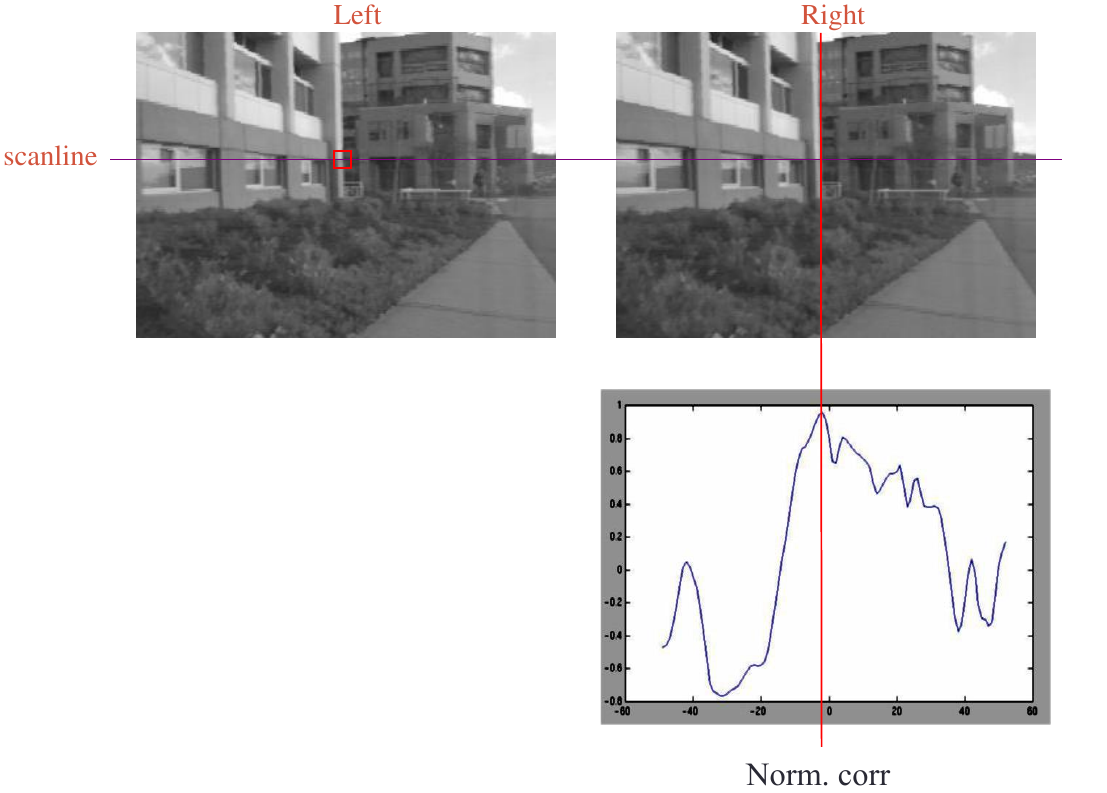
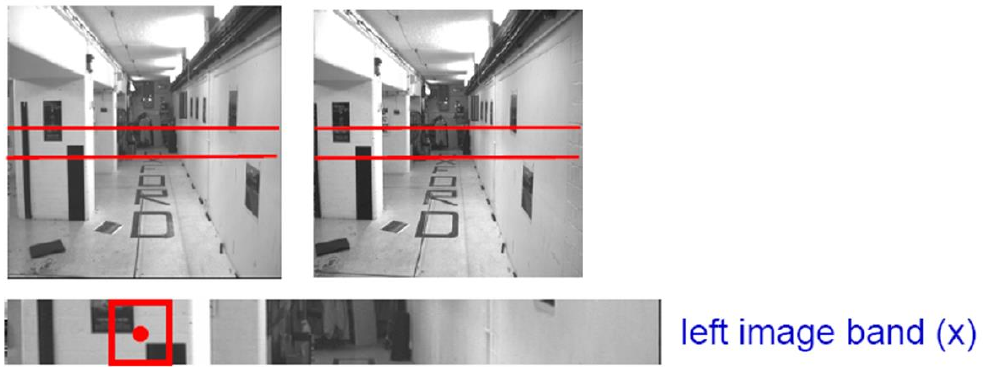
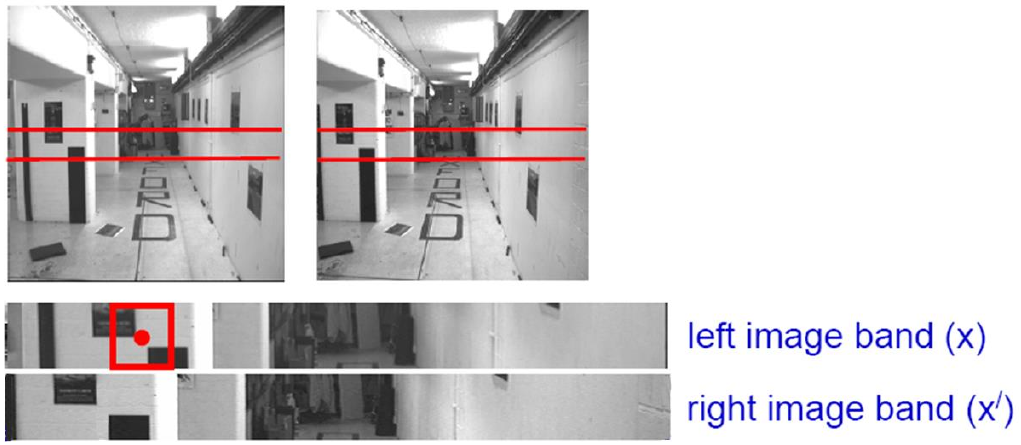
corr. search with similarity constraint
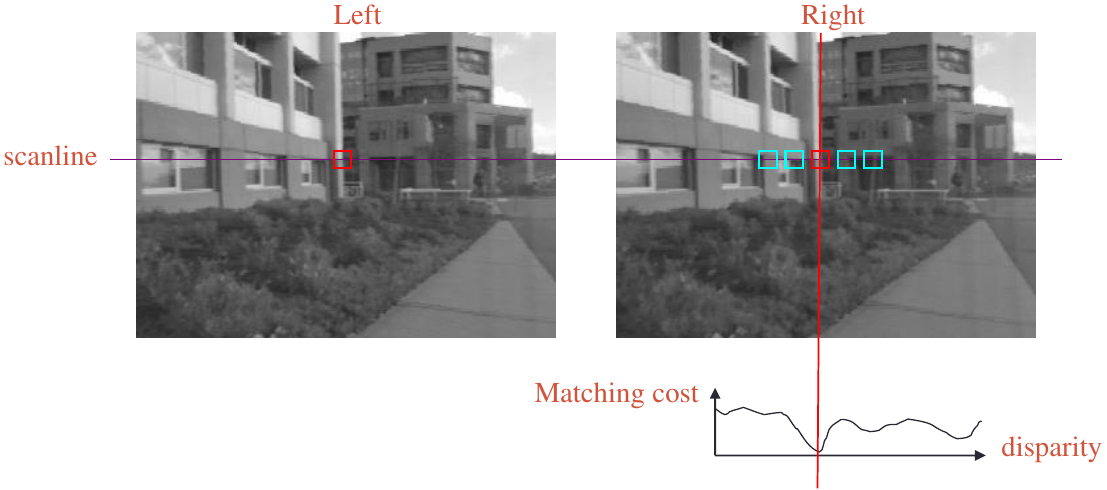
- Slide a window along the right scanline and compare contents of that window with the reference window in the left image
- Matching cost: SSD or normalized correlation
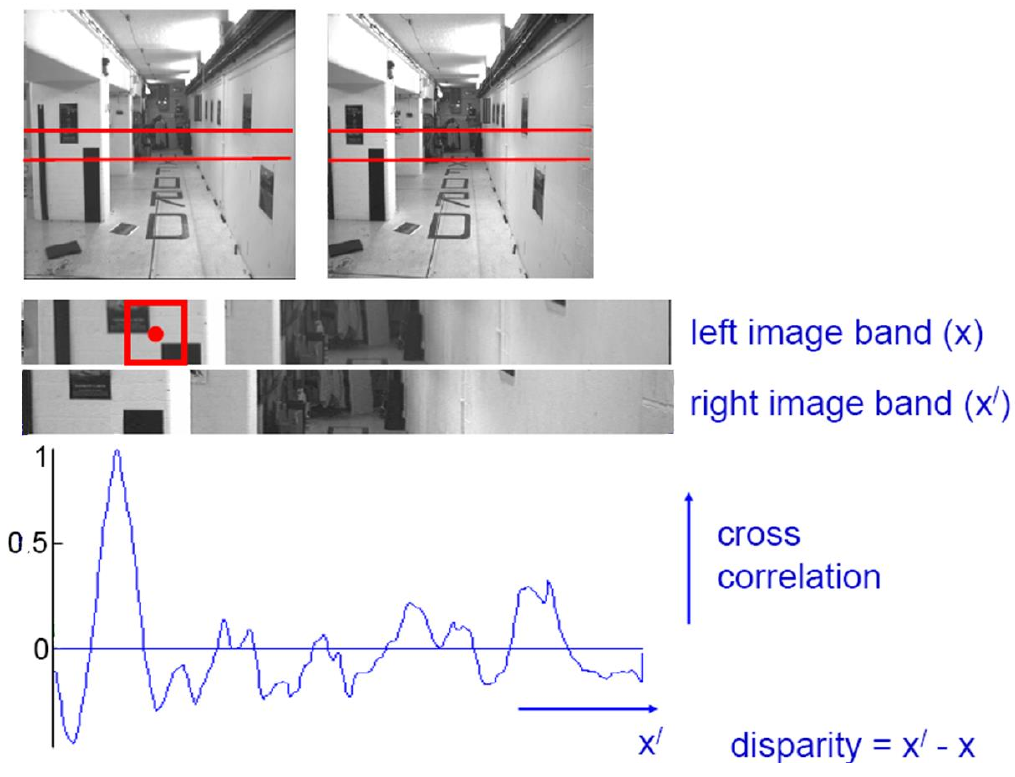
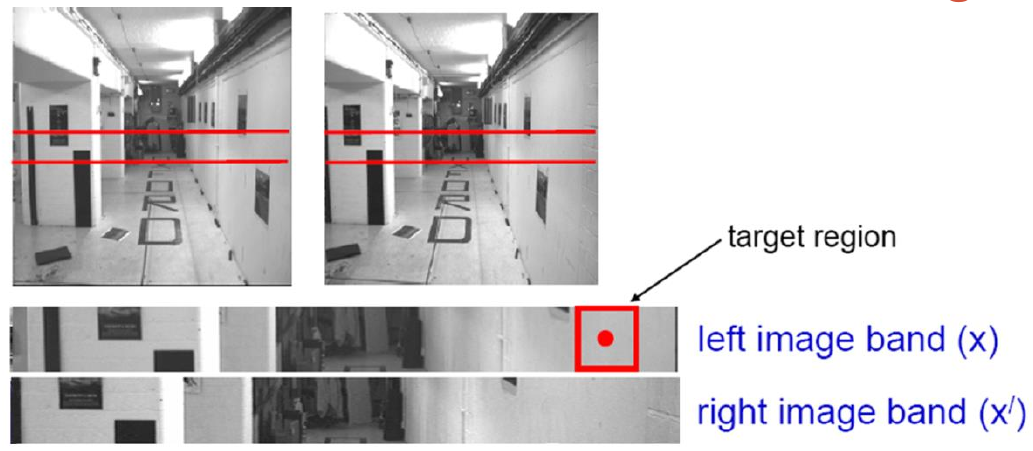
corr. search with similarity constraint
corr. search with similarity constraint
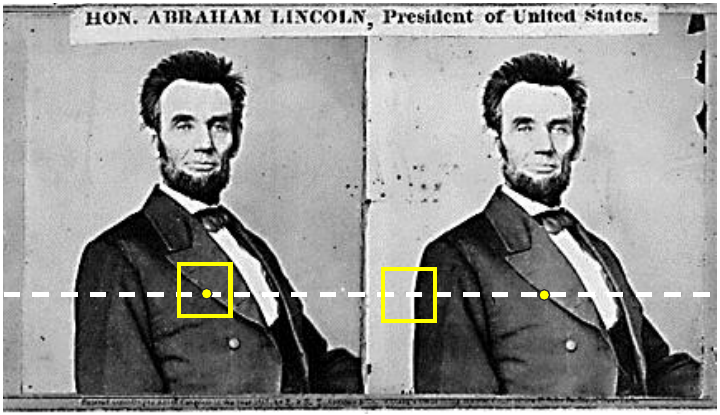
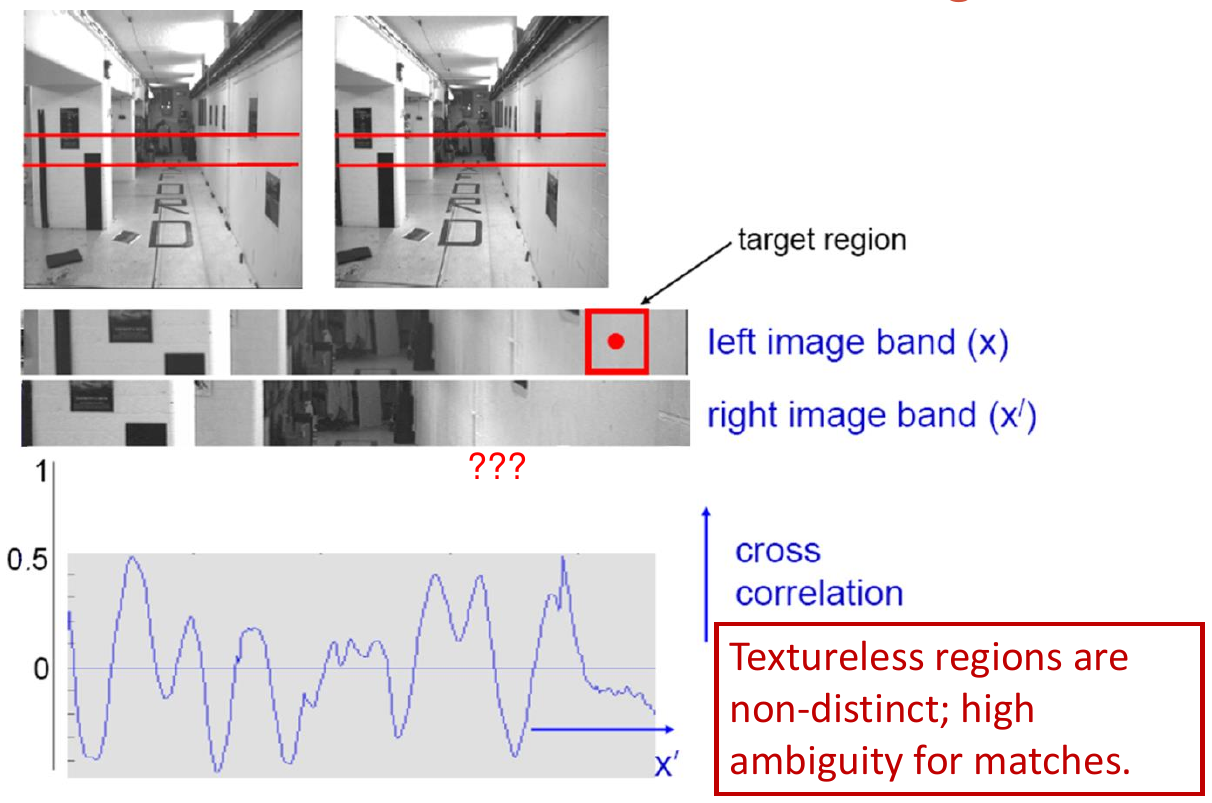
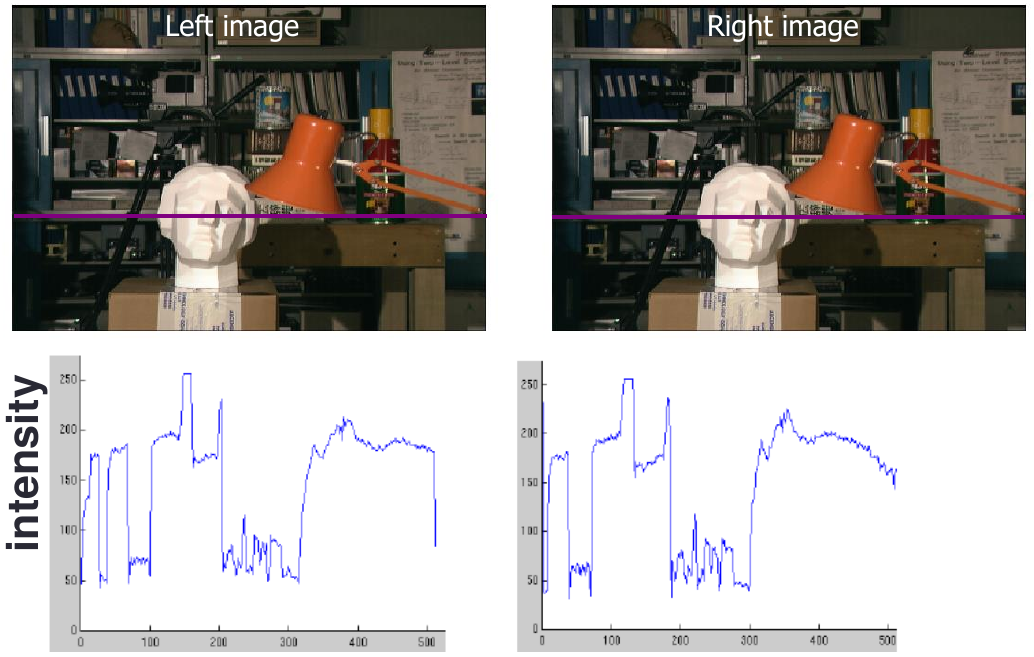
correspondence problem
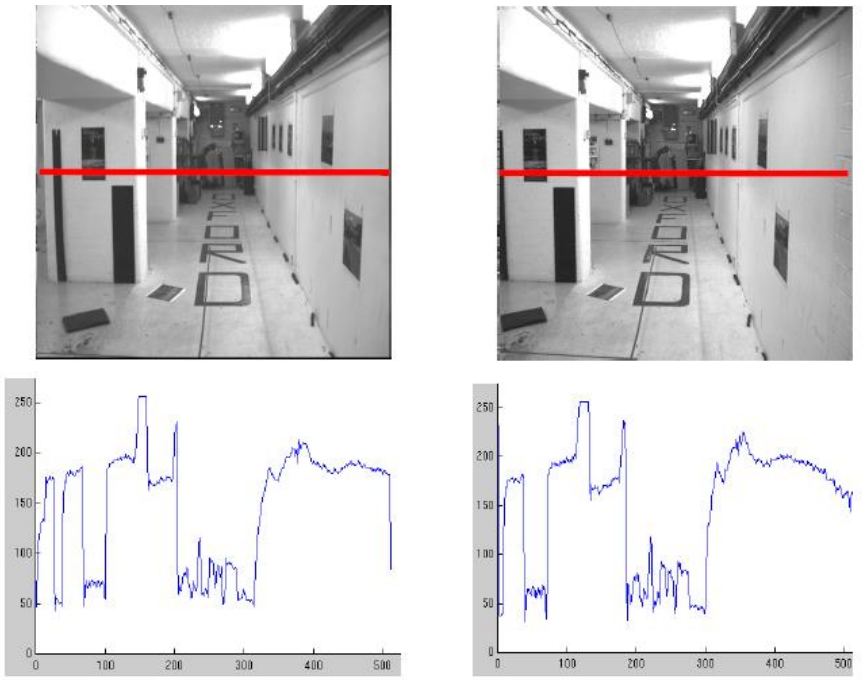
Clear correspondence between intensities, but also noise and ambiguity
correspondence problem
Neighborhoods of corresponding points are similar in intensity patterns
correspondence problem
correspondence problem
correspondence problem
correspondence problem
correspondence problem
effect of window size
effect of window size


Want window large enough to have sufficient intensity variation, yet small enough to contain only pixels with about the same disparity.
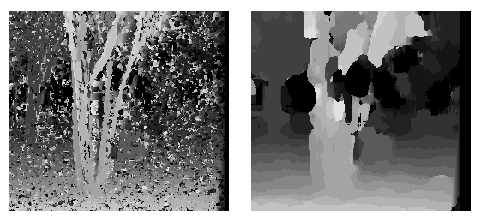
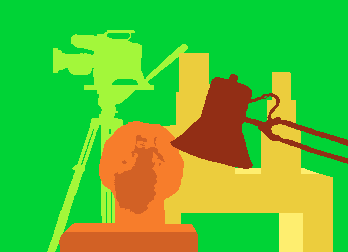
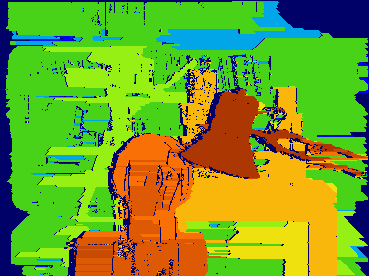
results with window search
better solutions
- Beyond individual correspondences to estimate disparities
- Optimize correspondences assignments jointly
- Scanline at a time (dynamic programming)
- Full 2D grid (graph cuts)
scanline stereo
- Try to coherently match pixels on the entire scanline
- Different scanlines are still optimized independently
coherent stereo on 2D grid
- Scanline stereo generates streaking artifacts
- Can't use dynamic programming to find spatially coherent disparities/correspondences on a 2D grid
stereo as energy minimization
- What defines a good stereo correspondence?
- Match quality
- Want each pixel to find a good match in the other image
- Smoothness
- If two pixels are adjacent, they should (usually) move about the same amount
- Match quality
stereo as energy minimization
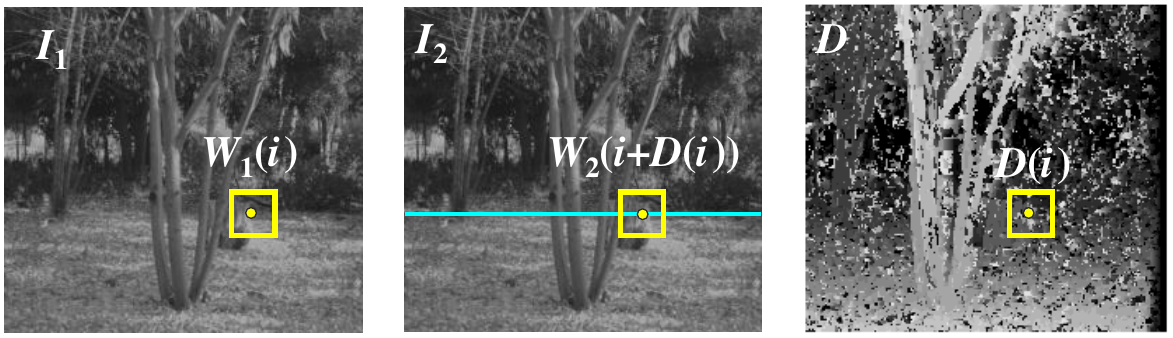
\[\begin{array}{cc} E = \alpha E_\text{data}(I_1,I_2,D)+ \beta E_\text{smooth}(D) & \begin{array}{c} E_\text{data} = \sum_i \bigl(W_1(i) - W_2(i+D(i))\bigr)^2 \\ E_\text{smooth} = \sum_{\mathrm{neighbors}\ i,j} \rho\bigl(D(i) - D(j)\bigr) \end{array}\end{array}\]
Energy functions of this form can be minimized using graph cuts
Y.Boykov, O.Veksler, and R.Zabih. Fast Approximate Energy Minimization via Graph Cuts. PAMI 2001. link
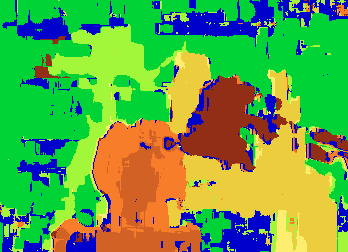
stereo as energy minimization
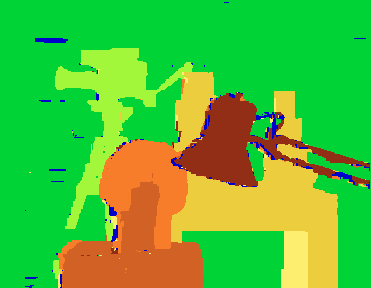
Better results!
For the latest and greatest: http://vision.middlebury.edu/stereo/
challenges
- Low-contrast; texture-less image regions
- Occlusions
- Violations of brightness constancy (e.g., specular reflections)
- Really large baselines (foreshortening and appearance change)
- Camera calibration errors
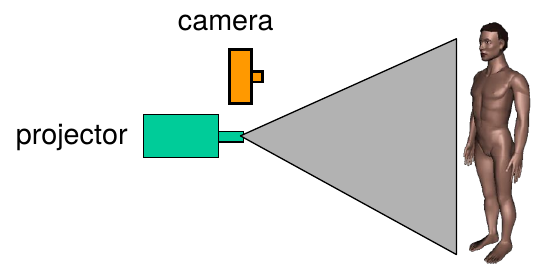
active stereo with structured light

Project "structured" light patterns onto the object
|
 |
L.Zhang, B.Curless, and S.M.Seitz. Rapid Shape Acquisition Using Color Structured Light and Multi-pass Dynamic Programming. 3DPVT 2002. link
Kinect: Structured infared light
 |
 |
https://bbzippo.wordpress.com/2010/11/28/kinect-in-infrared/
summary
- Epipolar geometry
- Epipoles are intersection of baseline with image planes
- Matching point in second image is on a line passing through its epipole
- Fundamental matrix maps from a point in one image to a line (its epipolar line) in the other
- Can solve for \(F\) given corresponding points (e.g., interest points)
- Stereo depth estimation
- Estimate disparity by finding corresponding points along scanlines
- Depth is inverse to disparity