
Templates, Image Pyramids, Filter Banks
COS 351 - Computer Vision
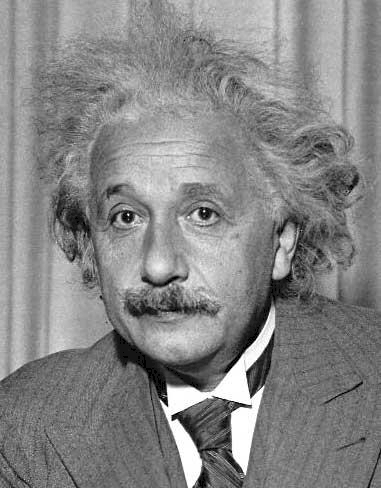
template matching
|
Goal: find
Main challenge: What is a good similarity or distance measure between two patches?
|
 |
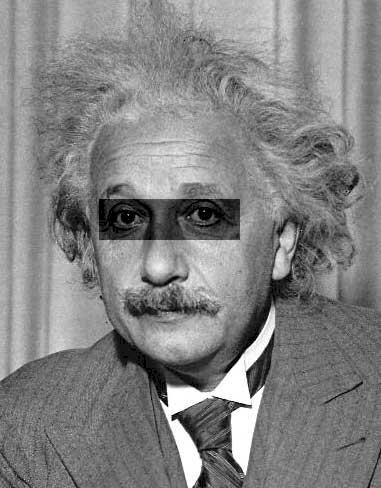
matching with filters
Goal: find
 in image
in image
Method 0: filter the image with eye patch
\[h[m,n] = \sum_{k,l} g[k,l] f[m+k,n+l]\]
\(f\) is image, \(g\) is filter
matching with filters
Goal: find
in image
Method 1: filter the image with zero-mean eye
\[h[m,n] = \sum_{k,l} (g[k,l])-\overline{g}) f[m+k,n+l]\]
\(\overline{g}\) is mean of \(g\)
matching with filters
Goal: find
in image
Method 2: SSD
\[h[m,n] = \sum_{k,l} (g[k,l])-f[m+k,n+l])^2\]
\(\overline{f}\) is mean of \(f\)
matching with filters
Goal: find
in image
Method 2: SSD
\[h[m,n] = \sum_{k,l} (g[k,l])-f[m+k,n+l])^2\]
What is the potential downside?
matching with filters
Goal: find
in image
Method 3: Normalized cross-correlation
\[h[m,n] = \frac{\sum_{k,l} (g[k,l])-\overline{g})(f[m-k,n-l]-\overline{f}_{m,n})}{\left( \sum_{k,l}(g[k,l] - \overline{g})^2 \sum_{k,l}(f[m-k,n-l]-\overline{f}_{m,n})^2 \right)^{0.5}}\]
MATLAB: normxcorr2(template, im)
matching with filters
Goal: find
in image
Method 3: Normalized cross-correlation
matching with filters
Goal: find
in image
Method 3: Normalized cross-correlation
q: what is the best method to use?
a. depends
- SSD: faster, sensitive to overall intensity
- Normalized cross-correlation: slower, invariant to local average intensity and contrast
- But really, neither of these baselines are representative of modern recognition
q: what if we want to find larger or smaller eyes?
|
a. Use image pyramid to find |
 |
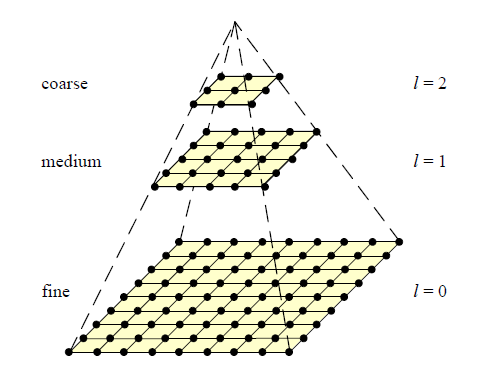
review of sampling

gaussian pyramid
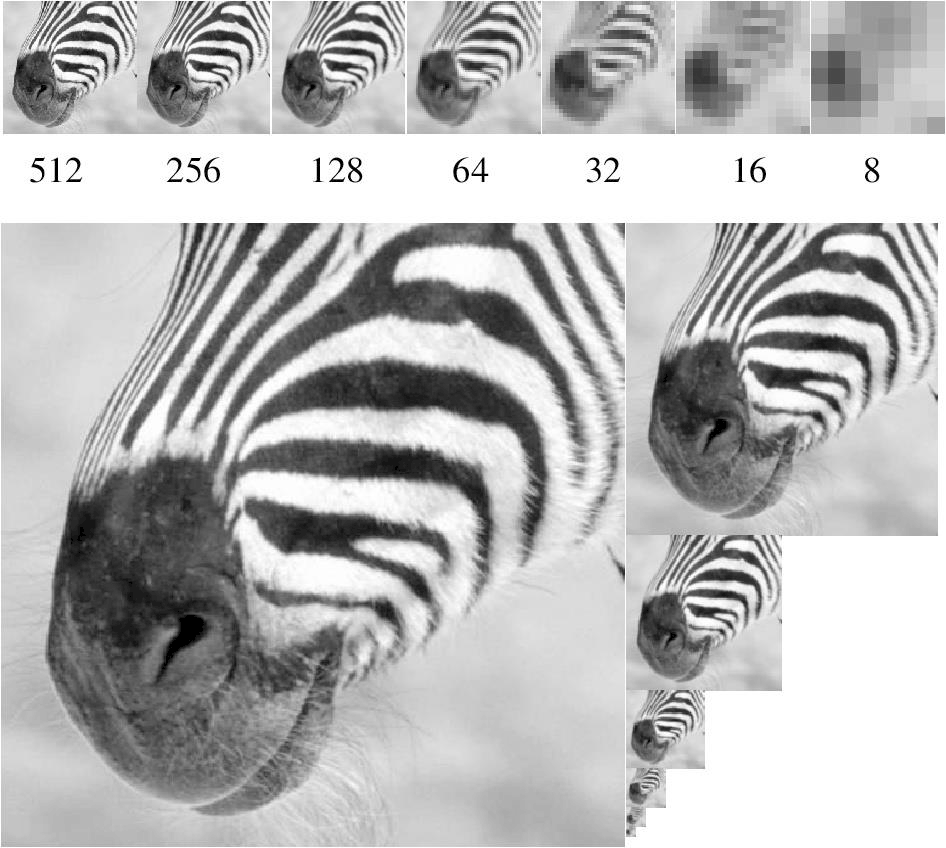
template matching with image pyramids
input: image, template
- match template at current scale
- downsample image
- repeat steps 1 and 2 until image is very small
- take responses above some threshold, perhaps with non-maxima suppression
2d edge detection filters
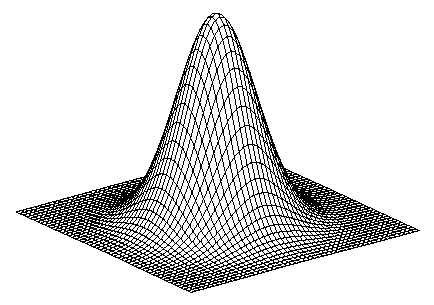
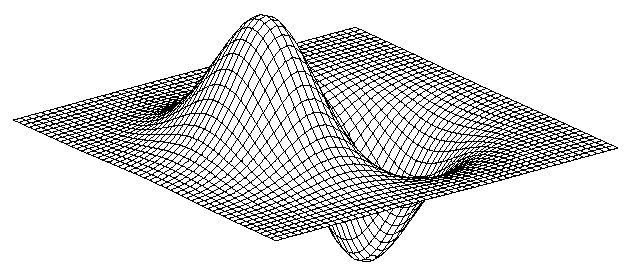
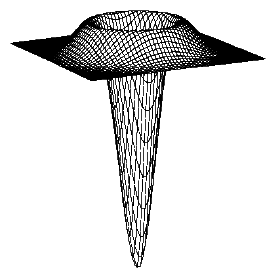
\[h_\sigma(u,v) = \frac{1}{2 \pi \sigma^2} e^{-\frac{u^2+v^2}{2 \sigma^2}},\quad \frac{\partial}{\partial x} h_\sigma(u,v),\quad \nabla^2 h_\sigma(u,v)\]
\(\nabla^2\) is the Laplacian operator:
\[\nabla^2 f = \frac{\partial^2 f}{\partial x^2} + \frac{\partial^2 f}{\partial y^2}\]
laplacian filter
 \(-\)
\(\approx\)
\(-\)
\(\approx\)
computing gaussian/laplacian pyramid
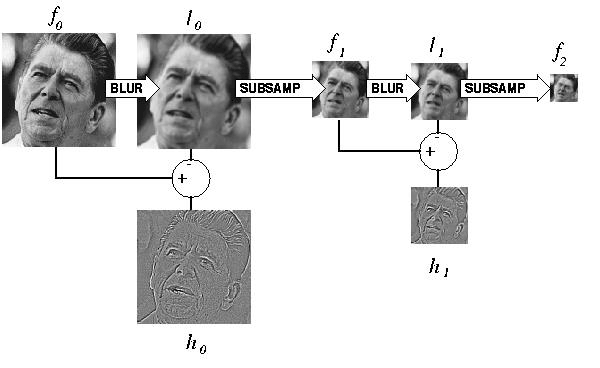
Can we reconstruct the original from the Laplacian pyramid?
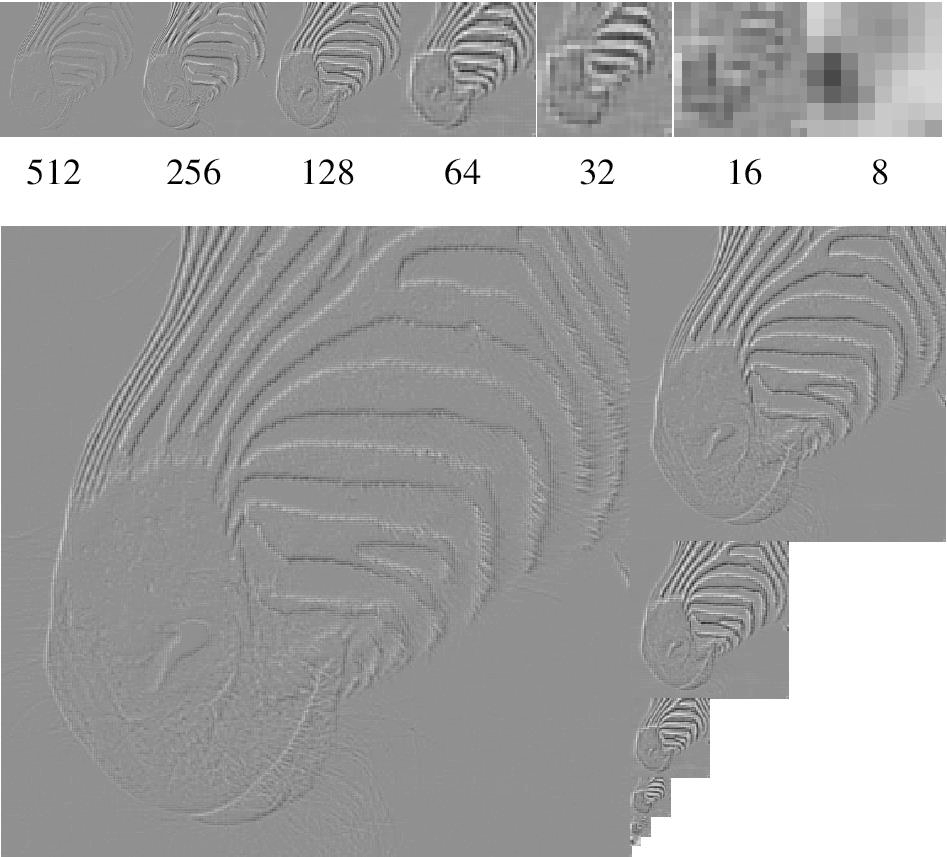
laplacian pyramid
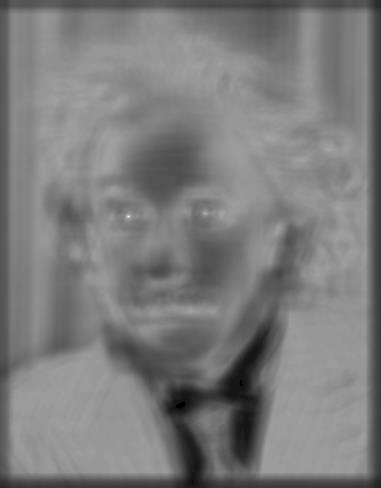
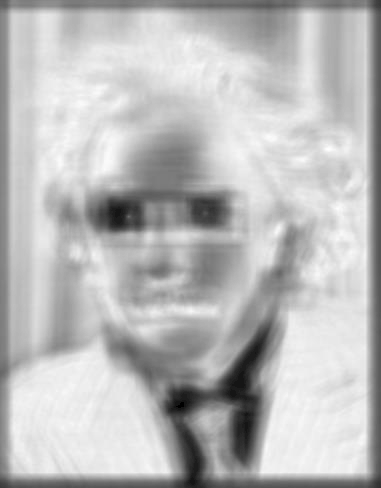
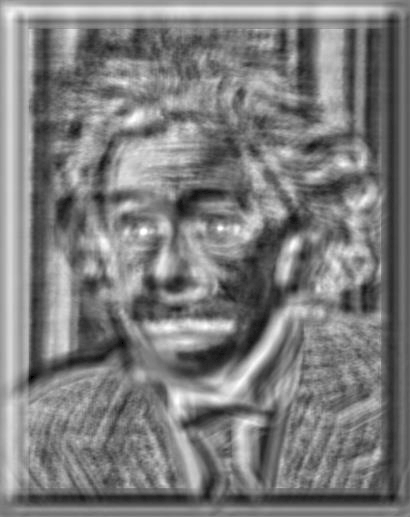
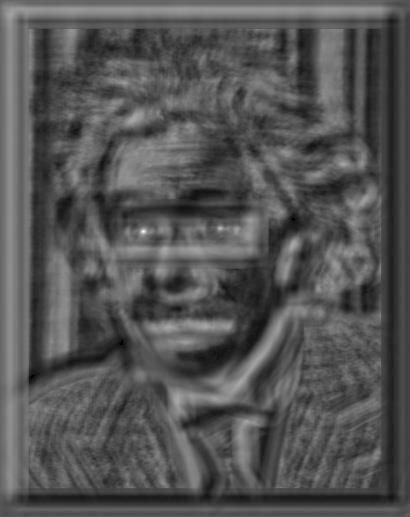
hybrid image

hybrid image in laplacian pyramid
high frequency -> low frequency
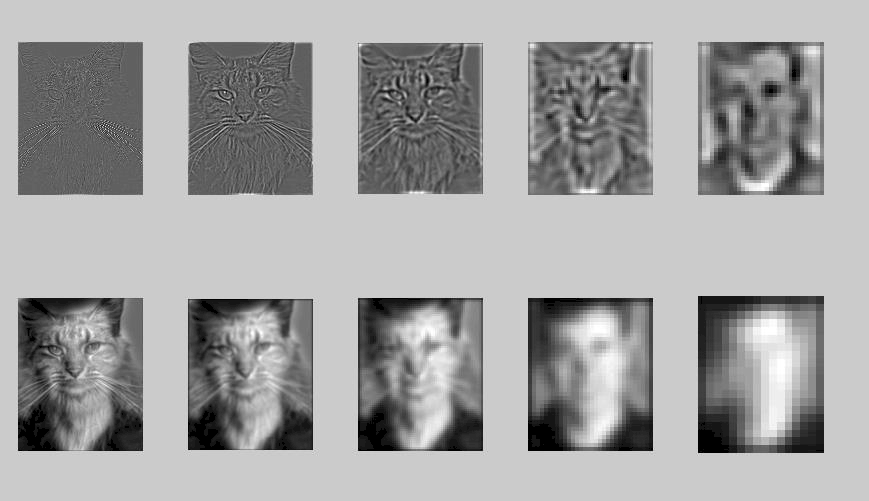
image representation
-
Pixels
- great for spatial resolution
- poor access to frequency
-
Fourier transform
- great for frequency
- not for spatial info
-
Pyramid/filter banks
- balance between spatial and frequency information
major uses of image pyramids
- compression
- object detection
- scale search
- features
- detecting stable interest points
- registration
- coarse-to-fine
coarse-to-fine image registration
- Compute Gaussian pyramid
- Align with coarse pyramid
- Successively align with finer pyramids
- Search smaller range
Why is this faster?
Are we guaranteed to get the same result?
compression
How is it that a 4MP image can be compressed to a few hundred KB without a noticeable change?
4MP = 4 million pixels = 2000 pixels x 2000 pixels
If storing 8bits/channel (RGB), each pixel uses 24bits = 3bytes.
\[4\text{MP} * 3\text{B/P} = 12,000,000\text{B} \approx 11,718\text{KB} \approx 11.5\text{MB} \]
lossy image compression (JPEG)

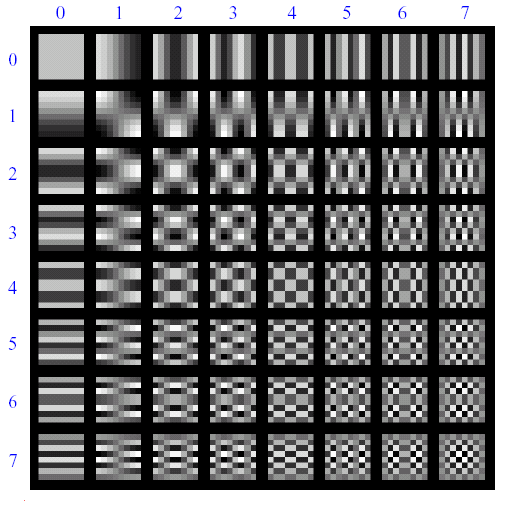
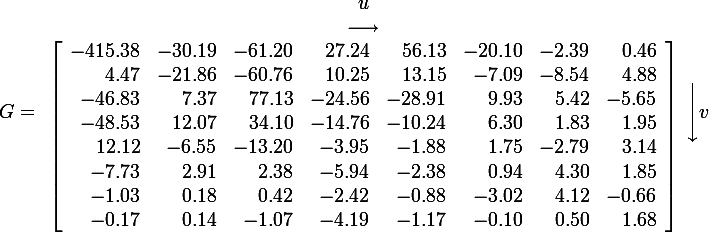
Block-based Discrete Cosine Transform (DCT)
using dct in jpeg
- The first coefficient
B(0,0)is the DC component, the average intensity - The top-left coeffs represent low frequencies, the bottom-right high frequencies.
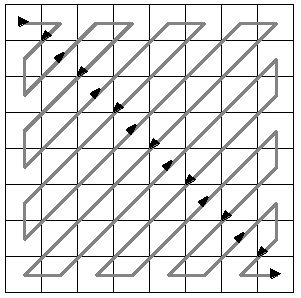
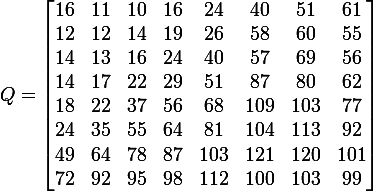
image compression using DCT
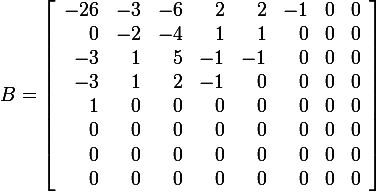
- Quantize
- More coarsely for high frequencies (which also tend to have smaller values)
- Many quantized high frequency values will be zero
- Encode
- Can decode with inverse DCT
jpeg compression summary
- Convert image to YCrCb
- Subsample color by factor of 2
- People have bad resolution for color
- Split into blocks (8x8, typically), subtract 128
- For each block
- Compute DCT coefficients
- Coarsely quantize
- Many high frequency components will become zero
- Encode (e.g., with Huffman coding)
reconstruction
“Left: a final image is built up from a series of basis functions. Right: each of the DCT basis functions that comprise the image, and the corresponding weighting coefficient. Middle: the basis function, after multiplication by the coefficient: this component is added to the final image. For clarity, the 8x8 macroblock in this example is magnified by 10x using bilinear interpolation.
”